Our Taurus motor controller line is a high efficiency brushless direct current (BLDC) motor controller which implements a field oriented control and space vector pulse width modulated (FOC/SVPWM) controller for highly efficient operation. We offer Taurus in various physical configurations, but all typically provide a combination of isolated CAN 2.0, RS-232, and RS-485 communications. These communication interfaces allow robust two-way communication with the Taurus and enable real time monitoring of system and health data.
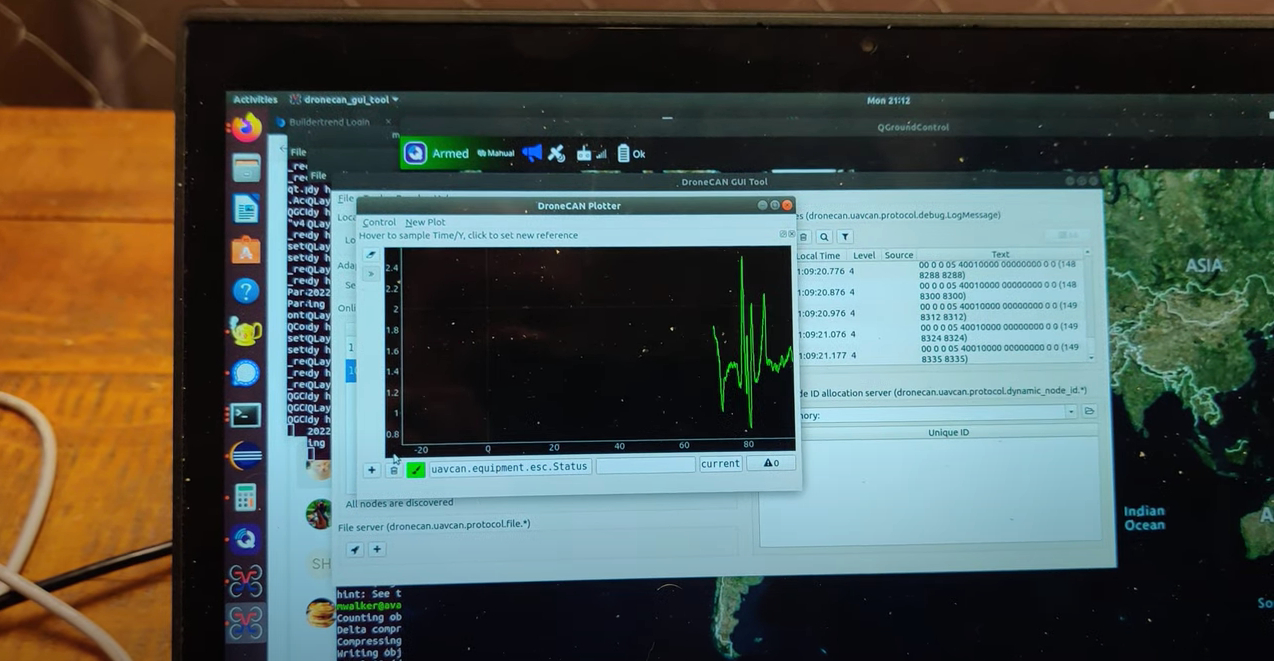
When the Taurus is delivered with allocortech’s native Yet Another Packet Protocol (YAPP) it seamlessly integrates with the rest of our software development kit, host tools, and products like the Clio hub. However, for those who are not yet operating in our development environment, and might still be running on one of the open source flight stacks in the market, our engineers have added support to the Taurus for the DroneCAN protocol. The implementation allows parameter configuration for matching your flight controller setup, and for safety (i.e. RPM limiter) needs. In addition, the controller supports real time data monitoring on the CAN bus using the flight controller or the available DroneCAN utilities.
There are more capabilities and configuration options which are likely to evolve the Taurus from this starting point over time. We’re excited to see where users and developers take our Taurus product line.